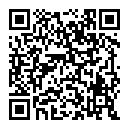
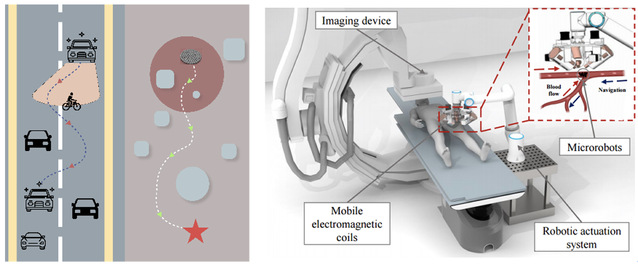
近日,我院机器人系王乾乾教授团队在智能机器人与系统国际会议IROS2025(IEEE/RSJ International Conference on Intelligent Robots and Systems)投稿的4篇论文全部被录用,涵盖了微型机器人自主导航、智能避障、多模态感知、三维操控与深度强化学习等前沿方向。团队提出的新型协作导航算法显著提升了微型机器人在流速环境下的自主导航能力;提出的一种结合触觉反馈的磁性微群机器人导航与控制策略,实现了在流体环境中对微机器人集群的自适应精准操作;开发的基于深度强化学习的操控策略实现了微型机器人集群在局部观测环境下的自主避障;团队使用经典物理模型,实现了磁性微机器人的三维运动操控和选择性控制。这些研究成果推动了智能微机器人驱控机理与应用的同步发展,并为小尺度机器人系统的智能化、装备化提供了技术支撑。该系列论文第一作者均为学院在读硕士、博士研究生,本系列工作得到了国家自然科学基金、江苏省自然科学基金等项目的资助。
IEEE/RSJ IROS是全球机器人与智能系统领域最具影响力的学术盛会之一,是中国自动化学会A类会议,每年吸引来自世界各地的顶尖科研团队参与。
王乾乾教授课题组依托WG官网平台与江苏省精准医学装备设计与制造重点实验室,聚焦前沿机器人系统、智能机械装备中感知、决策、执行核心方向。主要研究方向为:①外场驱控机器人学,包括机器人系统设计、自动化驱控、成像定位及系统构建创;②微机器人集群系统设计及操控,包括集群驱控制、医学成像引导下物质的靶向递送系统构建;③磁控医疗装备的研发与应用,包括靶向输送系统、磁性生物基机器人微介入系统、柔性多模态医疗器械、生物医学应用探索等。(课题组主页:https://seuwanglab.github.io/)
供稿人:安宣谕 王乾乾
审核:彭龙 刘艺彤